Counter-uAS
Een 5D drone management uitdaging
Samen met Ordina Nederland heeft IMAGEM tijdens het Ground Based Air & Missile Defense Symposium laten zien hoe je van uitdaging naar gecontroleerd 5D drone management gaat. Informatiegestuurd optreden en technologische ontwikkelingen vormen daarbij het fundament.

In Nederland zijn naar schatting tussen de 150.000 en 200.000 drones in gebruik. Van speelgoed tot professionele drones die tot 7 kilometer ver vanaf de piloot (en weer terug) kunnen vliegen. Ook zijn er een kleine 700 gebieden in Nederland waar niet gevlogen mag worden of beperkingen gelden voor drones in de open categorie. In sommige zones, bijvoorbeeld rondom Schiphol, is het sowieso verboden om met een drone te vliegen.
Drones in opspraak
De afgelopen tijd hebben we verschillende negatieve berichten rondom drones in het nieuws kunnen lezen. Van spionage bij een Britse onderzeeërbasis tot drones die smokkelen of het luchtverkeer in de war sturen. De oorlog in Oekraïne laat zien dat het gebruik van diverse soorten drones geen uitzondering meer is, maar een zeer veel gebruikt inzetmiddel. Handhaving, veiligheid, privacy, spionage, maar ook terrorisme en eventuele aanvallen hebben allen een raakvlak met drones. Waar is een drone actief? Waar is de piloot? Hoe kan je dit managen?
Waar een drone actief is, kan met verschillende sensoren gedetecteerd worden. Voorbeelden hiervan zijn radar, radio frequency sensoren (RF) of een DJI aeroscope, om paar te noemen. Waar radar alleen de drone in beeld brengt kan RF ook de positie van de piloot (zender – ontvanger oftewel piloot – drone) in beeld brengen. De DJI Aeroscope gaat nog een stapje verder, deze kan naast locatie van drone en piloot ook de gegevens van de drone als type en uniek ID in beeld brengen. Na het beheersen komt een volgende uitdaging. In de praktijk hebben we te maken met gefragmenteerde locatie-informatie (verschillende sensoren), meerdere systemen en schermen die bewaakt moeten worden. Operators hebben geen toegang tot dezelfde gegevens en informatie, ook zijn de gegevens vaak niet interoperabel.
Overzicht
De oplossing, bronnen, applicaties en gebruikers zijn verbonden in een front-end weergave. Bronnen kunnen dynamisch worden uitgebreid volgens het “need to know and need to share” principe. Kortom, een Local Unmanned Aerial Traffic Management System (LUATMS). Counteren is immers pas mogelijk wanneer we overzicht hebben. Pas dan kunnen we beslissen hoe en waar geacteerd kan worden.
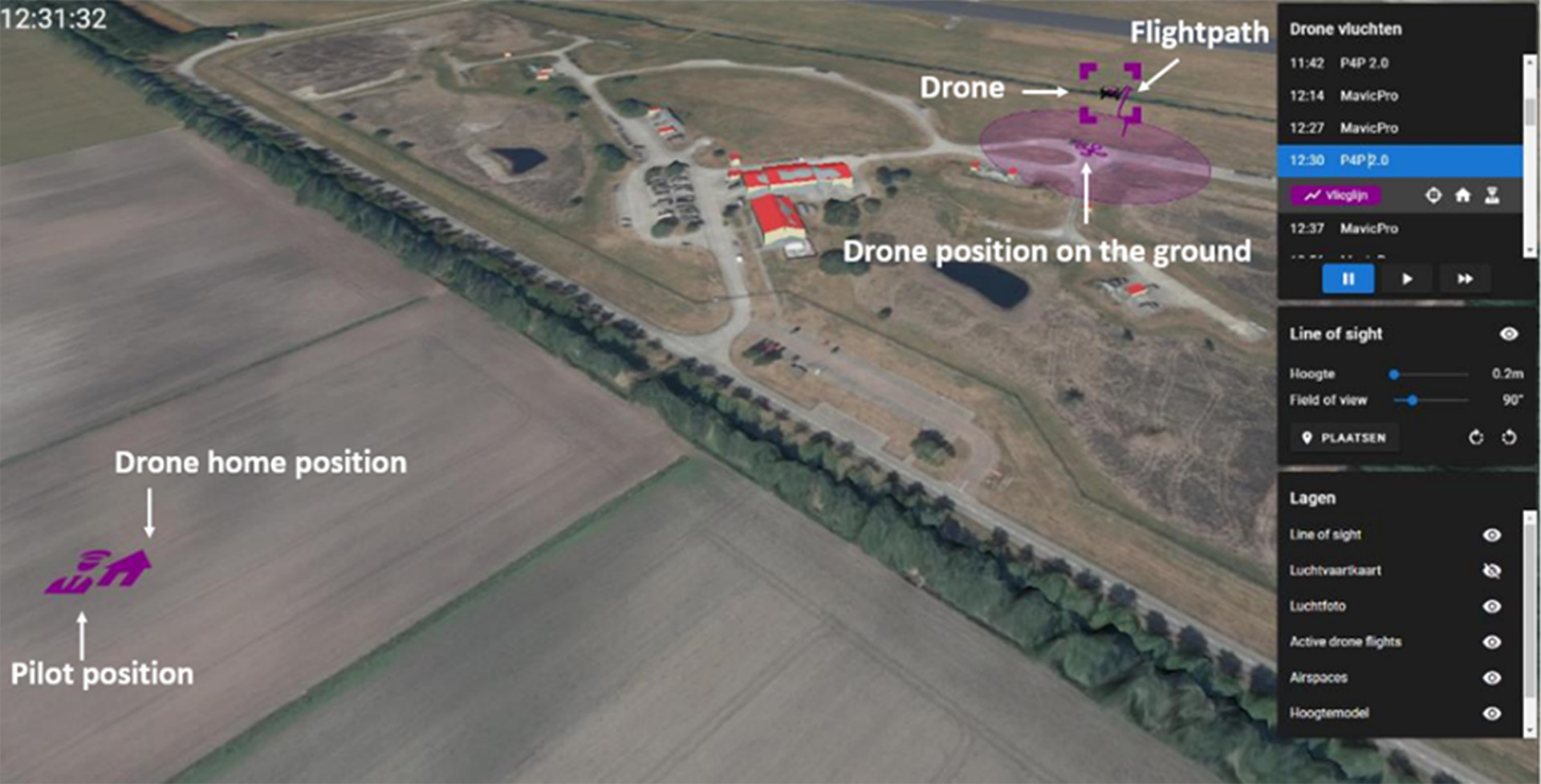
Dat klinkt natuurlijk logisch. De interface (afbeelding 1) ziet er eenvoudig en duidelijk uit. In een oogopslag is zicht op de situatie. Waar vliegt de drone (in 2D en 3D), waar staat de piloot, en waar is de ‘home’ positie van de drone? Is de situatie duidelijk? Dan kunnen er snel beslissingen genomen worden waarna men tot actie kan overgaan.
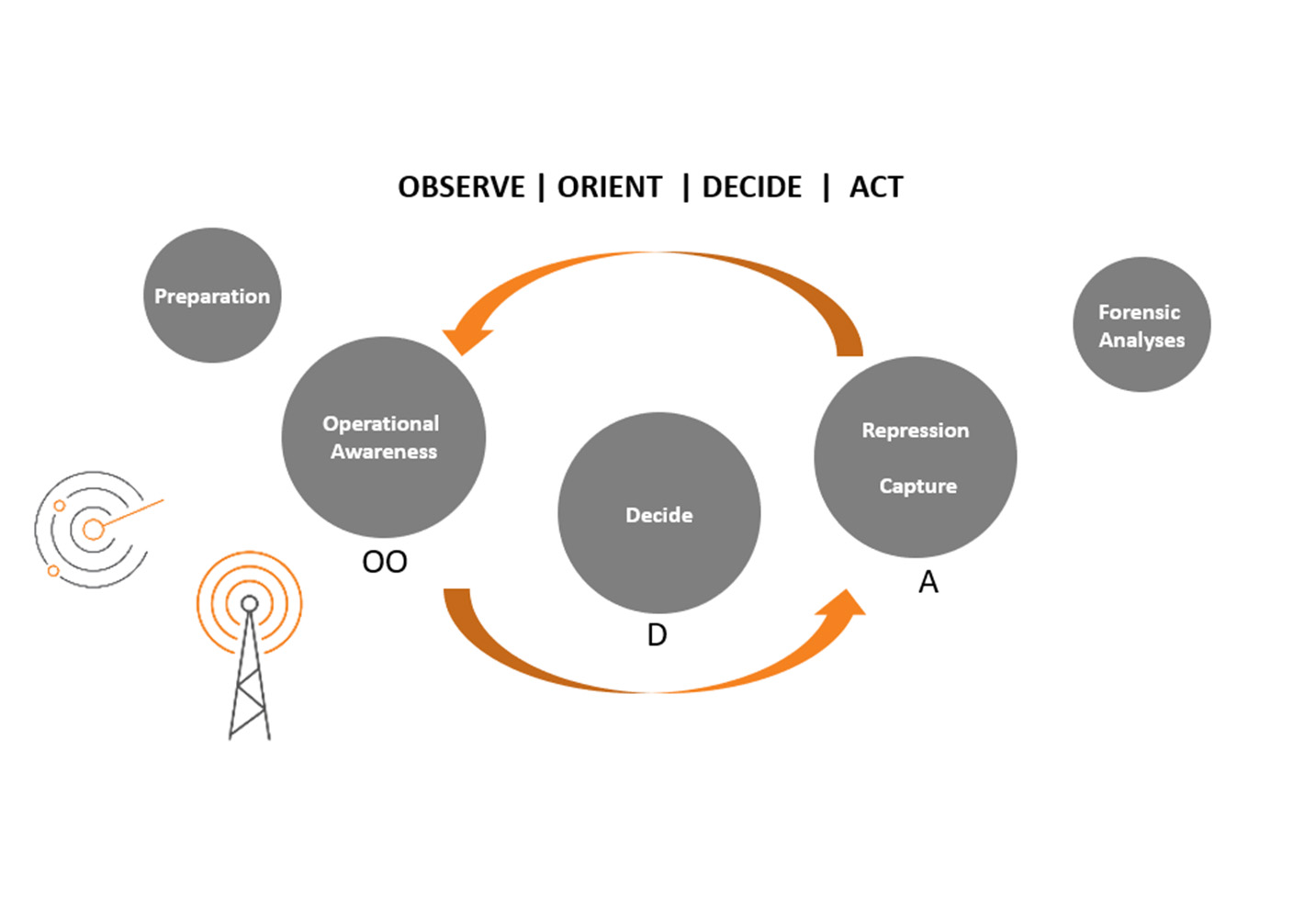
Informatiegestuurd optreden in een notendop. Door informatiegestuurd werken zorgen we voor een effectief gebruik van middelen waar en wanneer het ertoe doet. Binnen het Counter-UAS-domein vereist het de elementen van 3D, tijd en schaal (5D) om naadloos samen te werken om droneactiviteit te identificeren, locaties van operators te bepalen en te reageren op de status ervan. ‘Operational Awareness’, ‘Decide’ en ‘Repression | Capture’ vormen de onderdelen van de OODA (Observe–Orient– Decide–Act) loop.
Samenspel
Op afbeelding 2 zien we dat schematisch weergegeven. Links van de loop zien we preparation, concreet betekent dit de vraag waar sensoren kunnen worden opgesteld voor optimale dekking. Rechts van de loop, ‘Forensic Analyses’, na afl oop van een incident kan het incident en opvolgende actie geanalyseerd worden. Bijvoorbeeld, zijn er verbetermogelijkheden? Is er rechtmatig gehandeld? Op deze wijze komen bronnen, applicaties en gebruikers tot een geoptimaliseerd samenspel.
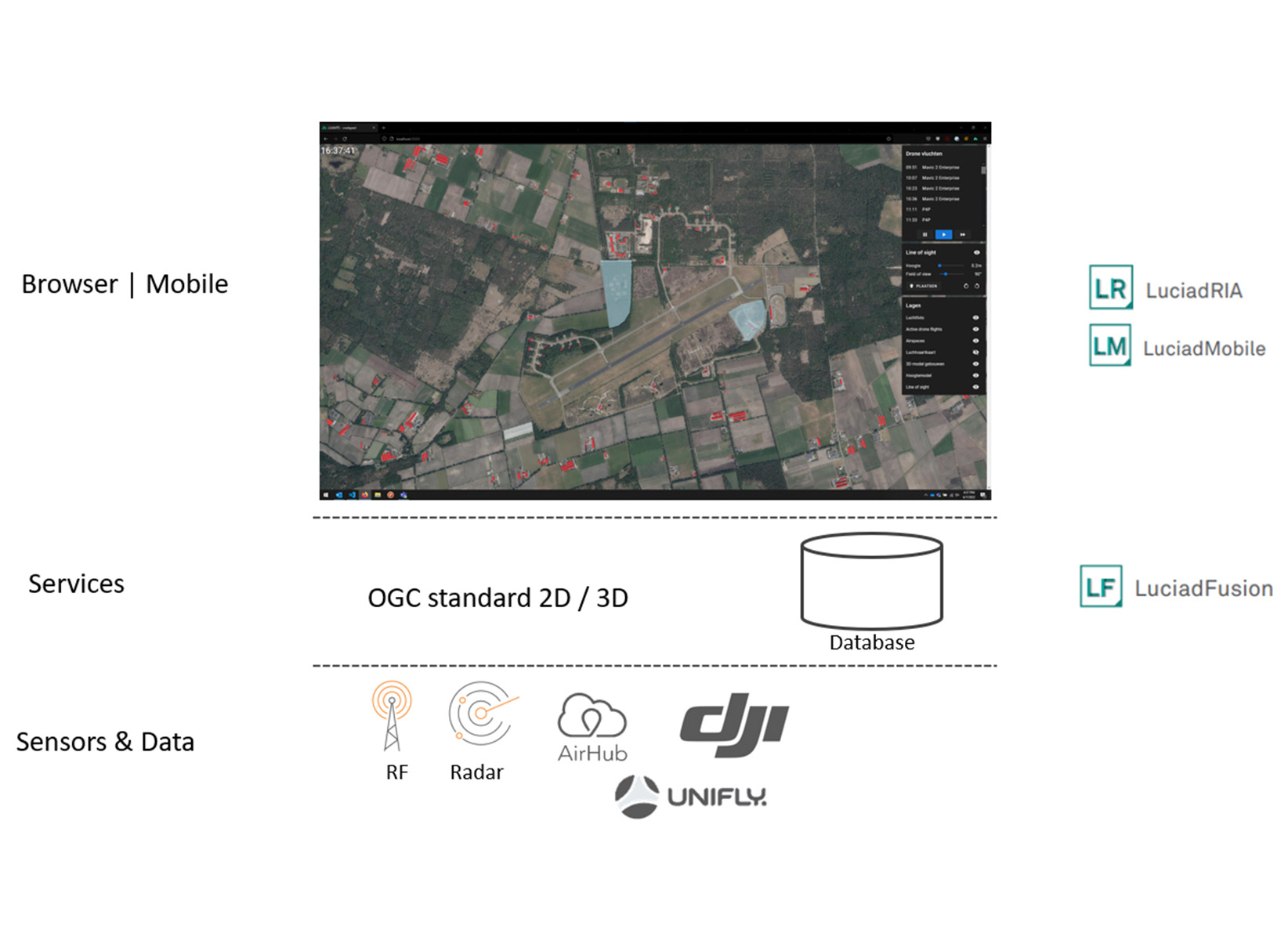
Het samenbrengen van de bronnen, applicaties en gebruikers wordt binnen Luciad aan de serverkant gerealiseerd. De facto sensor, radar, database en file connecties zijn hier geborgd. Via 2D en 3D OGC-standaarden wordt deze data naar de applicatie ontsloten. Dit kan een web, mobile of desktop client zijn. Bestaande applicaties welke OGC-standaarden ondersteunen kunnen eveneens van deze services gebruik maken.
Het principe van loose coupling is naast open standaarden toegepast binnen het Luciad platform. De verschillende onderdelen werken naadloos met elkaar samen, maar kunnen ook prima afzonderlijk van elkaar gebruikt worden. Concreet voorkant is niet afhankelijk van de achterkant en andersom. Op deze wijze kan Luciad relatief eenvoudig in een bestaande omgeving worden geïmplementeerd.
Op afbeelding 3 is een schematisch beeld dat dit in hoofdlijnen laat zien, verschillende sensoren worden met geografische data als een luchtfoto en 3D gebouwen in een interface getoond. De mogelijkheden binnen een 5D omgeving zijn enorm, om niet te veel uit te weiden heb ik hier een paar voorbeelden welke in LUATMS zijn gebruikt. In de voorbereidende fase kan met een ‘line-of-sight’ techniek inzicht verkregen worden in het gebied dat men kan monitoren. Dit kan radar, camera of mens zijn. ‘Field of view’ en hoogte kunnen dynamische aanpast worden. Een optimale inzet van middelen kan snel en eenvoudig gepland worden. Actieve geofencing-gebieden kunnen in 3D worden gerealiseerd als “closed airspace” Wanneer een drone een dergelijke airspace invliegt verandert deze direct van kleur en kan er automisch een alarm worden verstuurd. Bijvoorbeeld naar de operator die de sector waarin het alarm afgaat beveiligd.
Op basis van Luciad
In één oogopslag zicht op drone, piloot en home positie. Welke operator onderschept de drone en welke de piloot als er tot onderschepping wordt gekozen. De positie van de drone ten opzichte van de grond wordt weergegeven. Duidelijk is waar de drone zich bevindt en hoe (welke route moet afgelegd worden) de drone benaderd kan worden. De cirkel onder de drone staat symbool voor de kill zone. Wanneer een operator een drone blaster bij zich draagt (onderscheppingsmiddel) en zich binnen de cirkel bevindt kan deze ingezet worden.
Een 5D weergave van je operatiegebied zorgt voor een tijdige en effectieve reactie in een snel evoluerend domein. Ons Local Unmanned Aerial Traffic Management System (LUATMS) geeft dit beeld en helpt bij het nemen van passende maatregelen. De kennis van het gebruik van real-time data en applicatieontwikkeling vanuit Ordina gecombineerd met de 5D kennis van IMAGEM op basis van Luciad technologie heeft tot de realisatie van LUATMS geleid.