Together with Ordina Netherlands (Sopra Steria), IMAGEM demonstrated IMAGEM the Ground-Based Air & Missile Defense Symposium how to transition from a challenging situation to controlled 5D drone management. Information-driven operations and technological advancements form the foundation of this approach.
It is estimated that between 150,000 and 200,000 drones are in use in the Netherlands. These range from toys to professional drones capable of flying up to 7 kilometers away from the pilot (and back again). There are also just under 700 areas in the Netherlands where flying is prohibited or where restrictions apply to drones in the open category. In some zones, such as around Schiphol Airport, flying a drone is prohibited in any case.
Drones under scrutiny
Recently, we have seen various negative news stories about drones. From espionage at a British submarine base to drones used for smuggling or disrupting air traffic. The war in Ukraine shows that the use of various types of drones is no longer an exception, but a widely used tool. Law enforcement, security, privacy, espionage, as well as terrorism and potential attacks all intersect with drones. Where is a drone operating? Where is the pilot? How can this be managed?
The presence of a drone can be detected using various sensors. Examples include radar, radio frequency (RF) sensors, or a DJI Aeroscope, to name a few. While radar only detects the drone, RF can also pinpoint the pilot’s position (transmitter–receiver, or pilot–drone). The DJI Aeroscope goes a step further; in addition to the location of the drone and pilot, it can also display drone data such as type and unique ID. Once this is under control, the next challenge arises. In practice, we deal with fragmented location data (from various sensors), multiple systems, and screens that need to be monitored. Operators do not have access to the same data and information, and the data is often not interoperable.
Overview
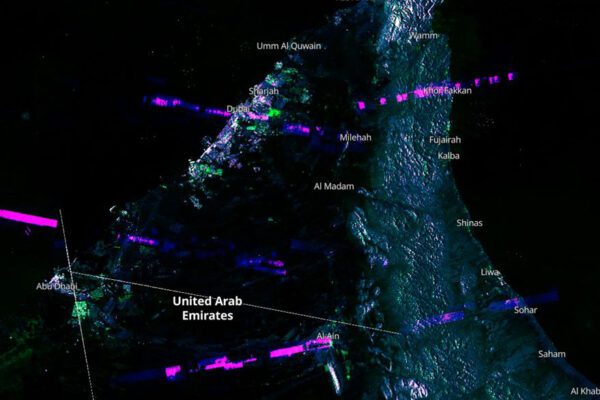
The solution, sources, applications, and users are integrated into a single front-end interface. Sources can be dynamically expanded according to the “need to know and need to share” principle. In short, a Local Unmanned Aerial Traffic Management System (LUATMS). After all, we can only respond effectively when we have a clear overview. Only then can we decide how and where to take action.
That makes sense, of course. The interface (Figure 1) looks simple and clear. You can assess the situation at a glance. Where is the drone flying (in 2D and 3D), where is the pilot, and where is the drone’s “home” position? Is the situation clear? If so, decisions can be made quickly, and action can be taken.

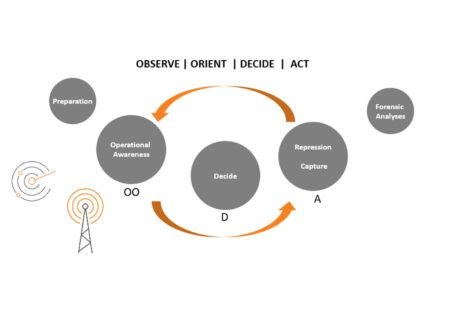
Information-driven operations in a nutshell. By adopting an information-driven approach, we ensure the effective use of resources where and when it matters most. Within the Counter-UAS domain, the elements of 3D, time, and scale (5D) must work together seamlessly to identify drone activity, determine operator locations, and respond to their status. “Operational Awareness,” “Decide,” and “Repression | Capture” are the components of the OODA (Observe–Orient–Decide–Act) loop.
Teamwork
Figure 2 shows this schematically. To the left of the loop is “Preparation”; specifically, this refers to determining where sensors can be positioned for optimal coverage. To the right of the loop, “Forensic Analyses,” allows for the analysis of the incident and subsequent actions after the incident has concluded. For example, are there opportunities for improvement? Was the response lawful? In this way, sources, applications, and users achieve optimized collaboration.
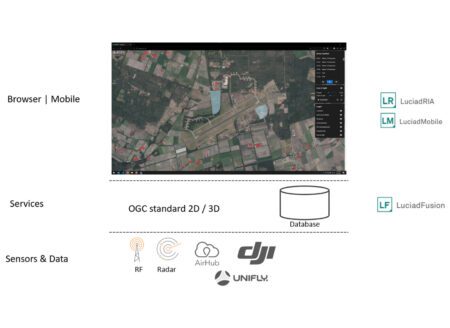
Within Luciad , the integration of data sources, applications, and users is handled Luciad the server side. This ensures reliable connections to sensors, radar systems, databases, and files. This data is made available to the application via 2D and 3D OGC standards. The application can be a web, mobile, or desktop client. Existing applications that support OGC standards can also utilize these services.
In addition to open standards, the principle of loose coupling has been applied within the Luciad . The various components work together seamlessly, but can also be used independently of one another. Specifically, the front end is not dependent on the back end, and vice versa. This makes it Luciad easy to implement Luciad in an existing environment.
Figure 3 provides a schematic overview of this concept; various sensors are displayed in an interface alongside geographic data such as aerial photos and 3D building models. The possibilities within a 5D environment are vast; to keep this brief, I’ve included a few examples here that have been used in LUATMS. During the preparatory phase, a “line-of-sight” technique can be used to gain insight into the area that can be monitored. This can involve radar, cameras, or personnel. ‘Field of view’ and altitude can be dynamically adjusted. Optimal deployment of resources can be planned quickly and easily. Active geofencing areas can be implemented in 3D as “closed airspace.” When a drone enters such an airspace, it immediately changes color, and an alarm can be sent automatically—for example, to the operator responsible for securing the sector where the alarm is triggered.
Based on Luciad
At a glance, you can see the drone, the pilot, and the home position. It shows which operator will intercept the drone and which will intercept the pilot if an interception is chosen. The drone’s position relative to the ground is displayed. It is clear where the drone is located and how (which route must be taken) the drone can be approached. The circle beneath the drone represents the kill zone. If an operator is carrying a drone blaster (interception device) and is located within the circle, it can be deployed.
A 5D view of your operational area ensures a timely and effective response in a rapidly evolving environment. Our Local Unmanned Aerial Traffic Management System (LUATMS) provides this view and helps in taking appropriate measures. Ordina’s expertise in real-time data utilization and application development, combined with IMAGEM 5D expertise IMAGEM Luciad , has led to the realization of LUATMS.
More information
Harald is a Business Consultant at IMAGEM. He bridges the gap between business, sales, and technology, and focuses on delivering value to the client. He collaborates with developers to create solutions for the public safety and security sector, educational institutions, and digital twins.
Would you like to learn more about this topic? Send Harald an email or send a message via our contact form.

Harald Görtz
Business Consultant